Hardware¶
Components¶
(prices in USD and links as of spring 2016)
| Name | Link | Distributor | Price | Notes |
|---|---|---|---|---|
| iRobot Create2 | https://www.adafruit.com/products/2388 | Adafruit | 199.99 | |
| Mini-DIN Connector Cable for iRobot Create 2 - 7 Pins - 6 feet | https://www.adafruit.com/products/2438 | Adafruit | 6.95 | |
| 4-channel I2C-safe Bi-directional Logic Level Converter - BSS138 | https://www.adafruit.com/products/757 | Adafruit | 3.95 | |
| UBEC DC/DC Step-Down (Buck) Converter - 5V @ 3A output | https://www.adafruit.com/products/1385 | Adafruit | 9.95 | |
| Rugged Metal On/Off Switch with Green LED Ring - 16mm Green On/Off | https://www.adafruit.com/products/482 | Adafruit | 4.95 | |
| Silicone Cover Stranded-Core Wire - 25ft 26AWG - Red | https://www.adafruit.com/products/2513 | Adafruit | 4.95 | For several Robots |
| Silicone Cover Stranded-Core Wire - 25ft 26AWG - Black | https://www.adafruit.com/products/2517 | Adafruit | 4.95 | For several Robots |
| Premium Female/Female Jumper Wires - 40 x 6” | https://www.adafruit.com/products/266 | Adafruit | 3.95 | For several Robots |
| Multi-Colored Heat Shrink Pack - 3/32” + 1/8” + 3/16” Diameters | https://www.adafruit.com/products/1649 | Adafruit | 4.95 | For several Robots |
| Panel Mount USB Cable - A Male to A Female | https://www.adafruit.com/products/908 | Adafruit | 3.95 | |
| Odroid C1+ | http://ameridroid.com/products/odroid-c1 | AmeriDroid | 38.95 | |
| WiFi Module 3 | http://ameridroid.com/products/wifi-module-3 | AmeriDroid | 9.95 | |
| DC Plug and Cable Assembly 2.5mm L-Type | http://ameridroid.com/products/dc-plug-and-cable-assembly-2-5mm-l-type | AmeriDroid | 1.95 | |
| Aluminum Standoff: 1/2” Length, 4-40 Thread, F-F (4-Pack) | https://www.pololu.com/product/2091 | Pololu | 1.39 | For 2 robots each |
| Machine Screw: #4-40, 1/4” Length, Phillips (25-pack) | https://www.pololu.com/product/1960 | Pololu | 0.99 | For up to 12 robots each |
| Machine Screw: #4-40, 5/16” Length, Phillips (25-pack) | https://www.pololu.com/product/1961 | Pololu | 0.99 | For up to 12 robots each |
| JST RCY Connector Pack, Female | https://www.pololu.com/product/1934 | Pololu | 1.75 | For up to 3 robots each |
| JST RCY Connector Pack, Male | https://www.pololu.com/product/1935 | Pololu | 1.75 | For up to 3 robots each |
| Parallax Standard Servo | https://www.parallax.com/product/900-00005 | Parallax | 12.99 | Optional |
| PING))) Ultrasonic Distance Sensor | https://www.parallax.com/product/28015 | Parallax | 29.99 | Optional |
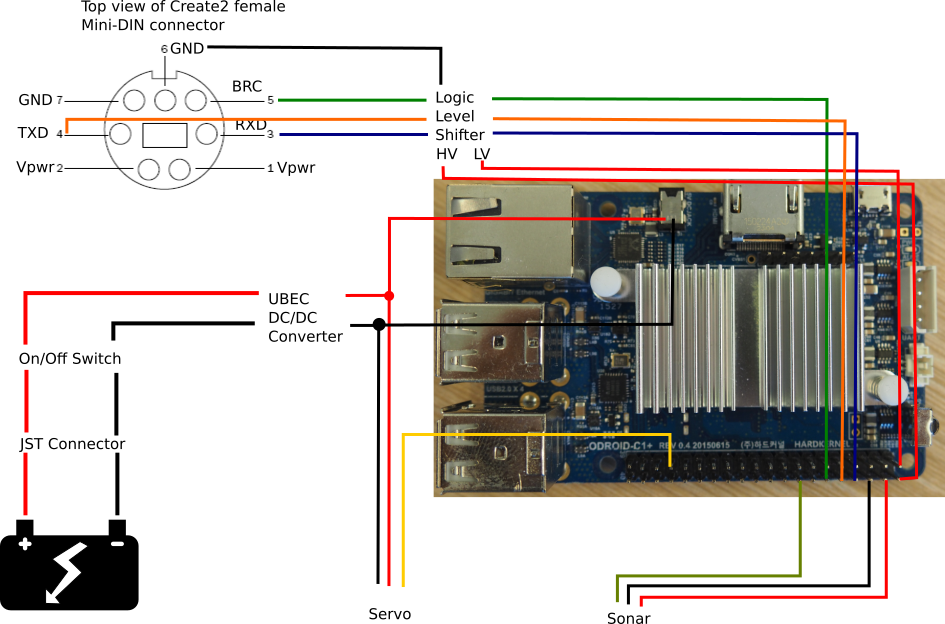
Wiring¶
Software¶
Basic¶
Download http://odroid.in/ubuntu_16.04lts/ubuntu-16.04-mate-odroid-c1-20160727.img.xz
Extract:
unxz ubuntu-16.04-mate-odroid-c1-20160727.img.xz
Verify MD5:
md5sum ubuntu-16.04-mate-odroid-c1-20160727.img f5dfee4a8ea919dd8afc4384431574e5 ubuntu-16.04-mate-odroid-c1-20160727.img
Copy to SD-Card:
sudo dd if=ubuntu-16.04-mate-odroid-c1-20160727.img of=</dev/path/of/card> bs=1M conv=fsync sync
Network¶
Add /etc/wpa_supplicant/wpa_supplicant.conf with following content:
network={ ssid="<SSID>" psk="<password>" id_str="wifi" }
Update /etc/network/interfaces:
# interfaces(5) file used by ifup(8) and ifdown(8) # Include files from /etc/network/interfaces.d: source-directory /etc/network/interfaces.d auto lo iface lo inet loopback auto wlan0 # allow-hotplug wlan0 iface wlan0 inet manual wpa-roam /etc/wpa_supplicant/wpa_supplicant.conf iface wifi inet dhcp iface default inet dhcp
Disable persistent network (so that SD-card can be used with any WiFi dongle):
sudo ln -s /dev/null /etc/udev/rules.d/80-net-setup-link.rules
PWM¶
Update /etc/modules:
# /etc/modules: kernel modules to load at boot time. # # This file contains the names of kernel modules that should be loaded # at boot time, one per line. Lines beginning with "#" are ignored. # Parameters can be specified after the module name. # ODROID HW PWM support (see http://odroid.com/dokuwiki/doku.php?id=en:c1_hardware_pwm) pwm-meson pwm-ctrl
GPIO Support¶
Add udev-rule: /etc/udev/rules.d/90-gpio.rules:
SUBSYSTEM=="gpio", KERNEL=="gpiochip*", ACTION=="add", PROGRAM="/bin/sh -c 'chown root:gpio /sys/class/gpio/export /sys/class/gpio/unexport ; chmod 222 /sys/class/gpio/export /sys/class/gpio/unexport'" SUBSYSTEM=="gpio", KERNEL=="gpio*", ACTION=="add", PROGRAM="/bin/sh -c 'chown root:gpio /sys%p/active_low /sys%p/direction /sys%p/edge /sys%p/value ; chmod 660 /sys%p/active_low /sys%p/direction /sys%p/edge /sys%p/value'"
Create GPIO group:
sudo groupadd gpio
Add user to group:
sudo adduser odroid gpio
Reboot
Additional Software¶
Update the system:
sudo apt update sudo apt upgrade
Install additional packages:
sudo apt install python3 python3-serial python3-scipy python3-numpy python3-matplotlib
Add User¶
Add user and assign groups:
sudo adduser csci445 sudo adduser csci445 gpio sudo adduser csci445 dialout
Debugging¶
You can use the USB UART Kit for debugging, see http://odroid.com/dokuwiki/doku.php?id=en:usb_uart_kit for more details. This will allow you to gain access to a shell using UART.
On you host PC, add /etc/udev/rules.d/99-odroiduart.rules with the following content:
SUBSYSTEM=="usb", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE="0664", GROUP="plugdev"
Make sure that your user is member of the plugdev group.
To connect, use:
picocom --baud 115200 /dev/ttyUSB0
You can end the session by pressing Ctrl+A followed by Ctrl+X.